Computational thinking is an important part of a modern education, and robotics provides a powerful tool for teaching programming logic in an interactive and engaging way.
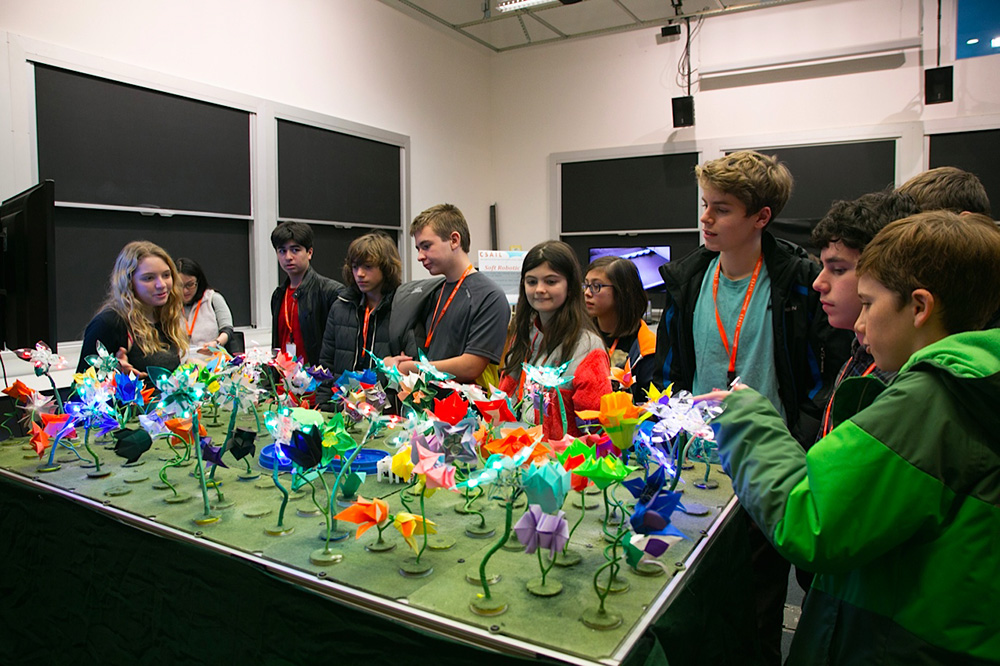
We are developing a robot garden: a distributed multi-robot system consisting of robot flowers, robot sheep, and robot ducks. The garden is capable of running autonomously or under user control from a simple graphical interface. Over 100 origami flowers are actuated with LEDs and printed pouch motors, and are deployed in a modular array around additional swimming and crawling folded robots. The movement and color appearance of the robots can be controlled.
The garden integrates rapid design and fabrication technologies with distributed systems software techniques to create a scalable swarm in which robots can be controlled individually or as a group. The garden can be used to program and visualize the behavior of classical graph algorithms and distributed graph algorithms. The execution sequence of such algorithms can be visualized by carefully programming the color of the flowers in the garden. The over 100 robots in this system (which can be easily extended to larger numbers) provides a large-scale platform for experimenting with robot control. We implemented a flooding algorithm, a graph-coloring algorithm, depth first search (DFS), breadth first search (BFS), and a distance-coloring algorithm in the garden as examples. We have used the Robot Garden in CSAIL’s 2014 Hour of Code event.